- For example, it should cost more to go uphill.
- The steeper the hill the higher the cost.
- There could be a threshold: if the gradient is too steep, it is a "cliff", that is, a barrier.
- Whatever you do, make it modular, so that it can be easily modified (in just one place).
- Discretize the terrain into large chunks, like a rectangular grid (see what GMU did in next bullet point) perhaps by averaging the height values within each rectangle. then search for a path through the grid, not the original terrain.
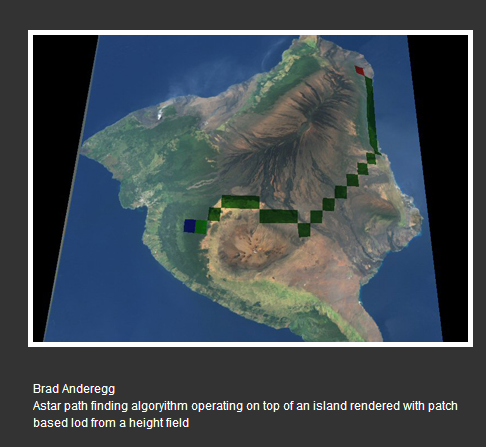
- Use the pixel granularity of the original terrain (e.g., for the "Terrain3" below, under "TERRAIN", both the skin and height map images are 512 by 512 pixels), but limit the branching factor by only allowing the agent to move NESW (the four compass directions) or maybe {N, NE, E, SE, S, SW, W, NW} (eight compass points), and only a single, fixed distance per move (e.g., 10 pixels).
- (I found all this off of the Virtual NMU Wiki, specifically under "Resources" on the TGE tab. Thanks, Alex and Brian!)
- The GuildHall at SMU has a page on Software Development which features the following screenshot:
-
 Notice the discretization (terrain was clearly divided into a rectangular
grid of limited granularity).
Notice the discretization (terrain was clearly divided into a rectangular
grid of limited granularity). - Also look at
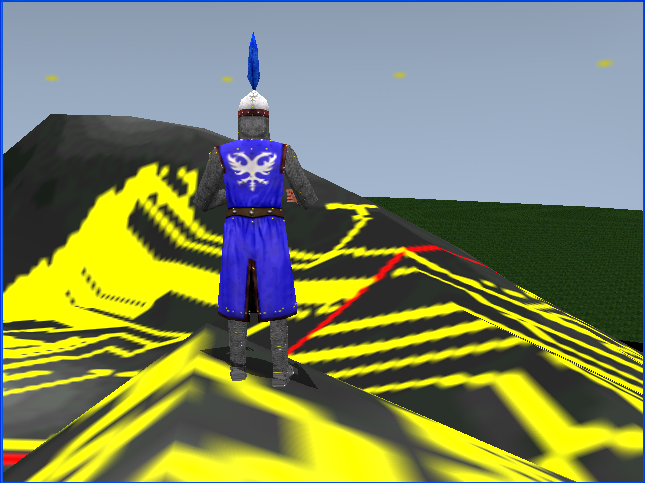
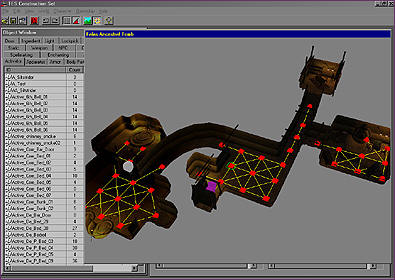 (from Bethesda Softwork's
Morrowind''s
AI):
(from Bethesda Softwork's
Morrowind''s
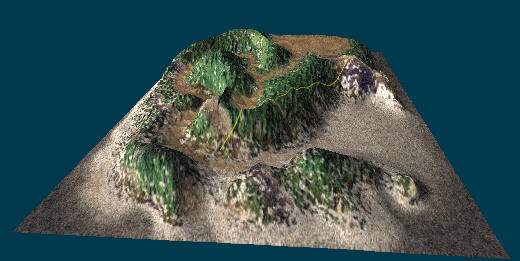
AI): - Also, take a look at this example of path finding on water rather than land, from the paper An optimal pathfinder for vehicles in real-world digital terrain maps, from The Royal Institute of Science, Stockholm, Sweden.


- Here is an example terrain, with 3D visualization (left), 2D texture or "skin" (center), and 2D heightmap (right):
-
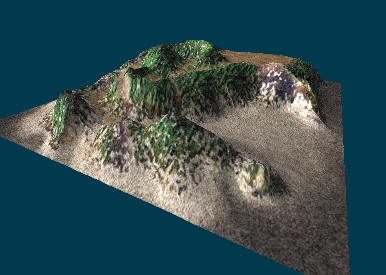


- You will need, at the very least, the jpg version of the height map file (for the terrain above, just click on rightmost image).
- You will need to get the height map file into your java program, and then you will need to get the pixel values into an int array. There is code (below) to do this...
- You might also want to read in the skin file to use information from that, or you might use it for plotting your path so that you can visualize the plan.
- Other terrains:
- We should be able to use our code on many terrain files out there on the web.
- For now my code is limited because I can only handle .bmp formats (in which the texture or skin is in a separate file).
- But here is the source of the island ("Terrain3") above: http://www.terminal26.de/terrains/index.php?lg=eng
- This site includes other usable terrains. (Remember to use MS Paint or MS Office Picture Manager or Adobe PhotoShop, etc. to convert the bmp height file to jpg so that Java's Applet::getImage method can read it in...)
- You can also use a terrain editor to make or modify
your own terrains:
- Terragen, Bryce, Terraformer, etc.
- Here is a Java-based editor that I have NOT tried: http://moogle.sandwich.net/terraingen.html (supposed to be for SimCity 300 terrains...)
- Or you could try finding the best path that fords this river (assuming an initial state and goal state on opposite sides...)